Reflections on “Fits Like a Flex-Glove”
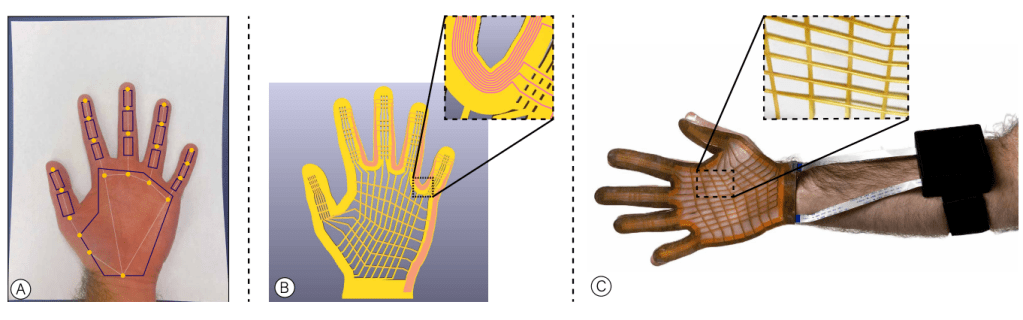
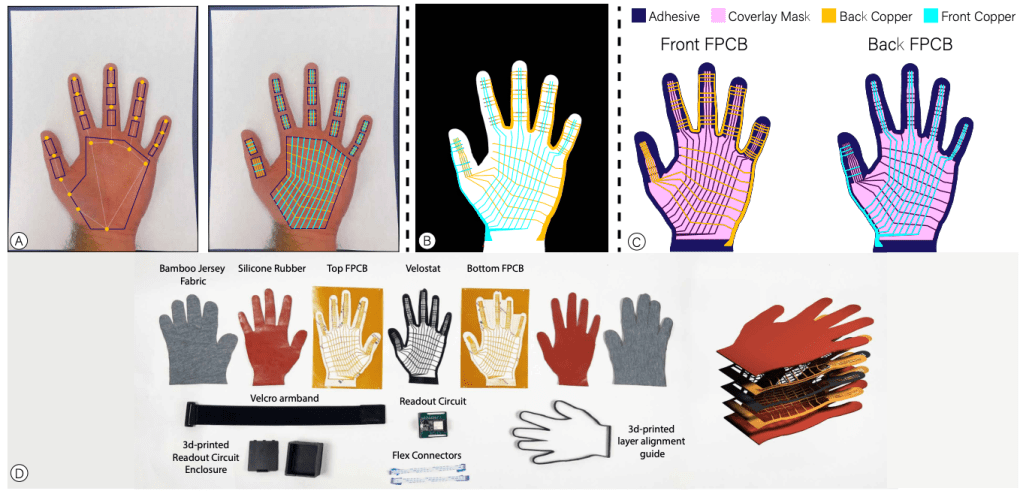
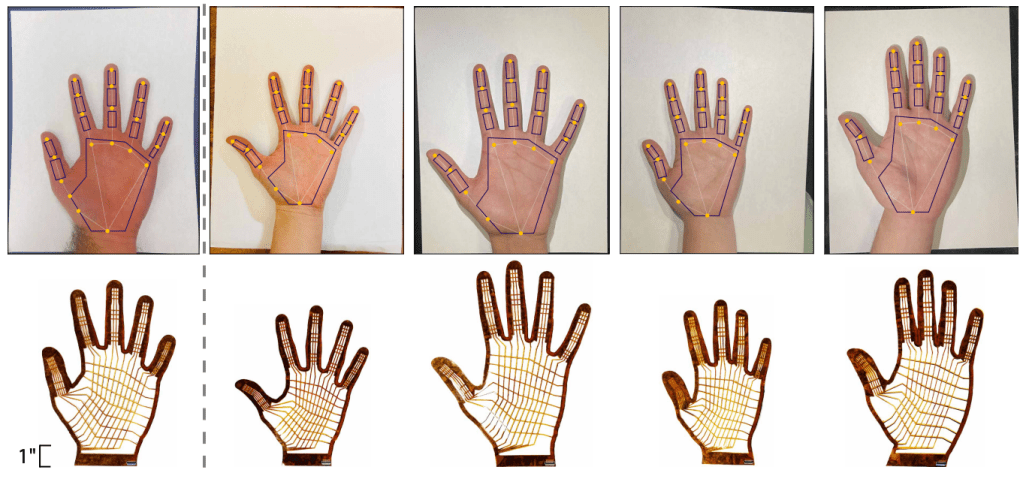
Having seen article like “Fits Like a Flex-Glove: Automatic Design of Personalized FPCB-Based Tactile Sensing Gloves”, I was intrigued to see how a simple photo of a hand can be transformed into a flexible printed circuit board (FPCB). Costs hover around $130 per glove, with assembly requiring only 15 minutes, thanks to increased dependence on standard board houses for fabrication, providing an approach that is much easier on the wallet than most tactile sensing methods. Embedded in each glove are resistive sensors that register pressure at multiple contact points: a future in robotics – where investigators could study how actual hands grab objects to build better grasping robot hands – and virtual reality: any realistic simulation of the tactile sensation of manipulating a physical object relies on simulated feedback to both touch and manipulate it as one would in real life. In healthcare, therapists may monitor improvements between sessions through subtle changes in grip strength or finger mobility, providing more accurate information to promote rehabilitation. What sets this project apart is the emphasis on affordability and fast prototyping and personal fit, since its design is generated from a single photo of a user’s hand on legal-size paper. Despite these daunting challenges (durability, sensor calibration drift or noise/error caused by non-optimal camera angles for the subject matter) the overall vision of more tactile technology for the masses is extremely attractive. Imagine sensors in modular patches, where sections can be replaced if one section is damaged, and wireless modules would ensure there are no cables getting caught, giving the subject freedom of movement.



Leave a comment